全驱全能,更智能、更安全、更可靠
-
 云边端一体化大脑
云边端一体化大脑
-
 手眼协同
手眼协同
-
 视触力协同
视触力协同
-
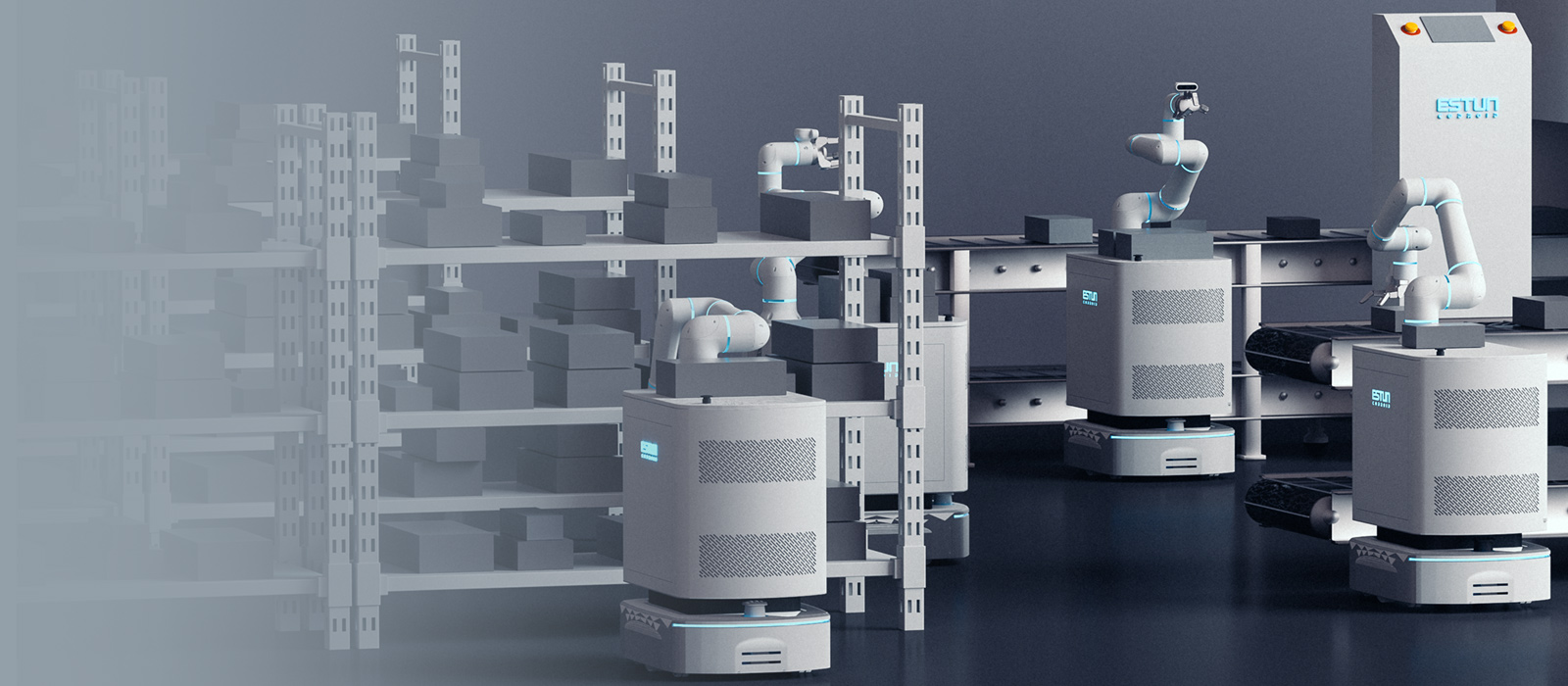
 全场景-工业/医疗/服务
全场景-工业/医疗/服务







 扫一扫,关注我们
扫一扫,关注我们
© 2024 Copyrights codroid.ai All rights reserved.
南京埃斯顿酷卓科技有限公司 版权所有 苏ICP备2023008279号