SA刚性关节模组,拥有SA14S、SA14、SA17、SA20、SA25、SA32、SA40七个型号,均支持EtherCat通讯协议,中通孔直径覆盖8、11、12、16mm,可满足用户从5.1 NM到382 NM额定关节扭矩应用的需求。
产品模块化地涵盖了驱动器、双编码器、谐波减速机、扭矩传感器、电机与抱闸,所有关节模组都经过优化,以满足现有协作机器人、仿生机器人、医疗机器人、人形机器人上下肢等应用技术规范,可大大缩短产品设计时间。




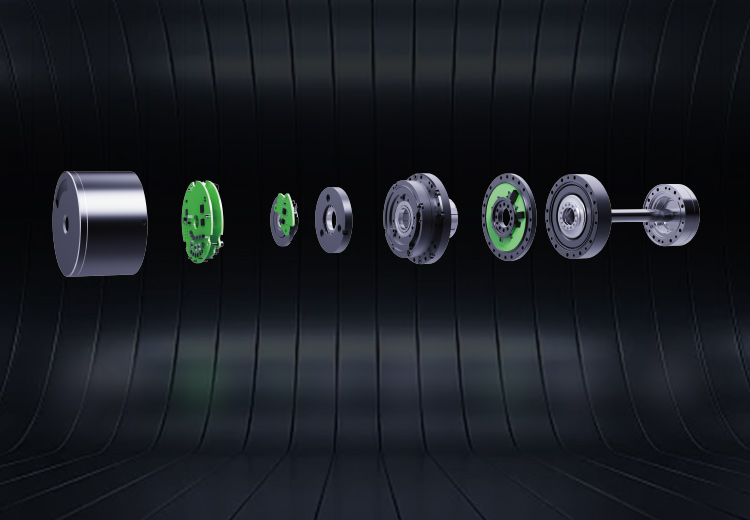
驱动器、电机、抱闸、减速机、扭矩传感器、编码器高度集成,结构紧凑
内部物理冗余结构设计,高速、高精度、高稳定性数据采样性能,满足全力控应用场景;机器人末端无需增加六维力矩传感器,对拖动示教外力检测更准确,关节力矩检测范围更大;其检测的输入力矩可以直接用于关节的过载检测,检测精度更高,有效保护工作人员及周边设备安全
转动惯量低,转矩输出稳定,峰值扭矩高,动态响应好;体积小、重量轻、扭矩大,性能极致优化
采用双反馈系统,电机端、减速机输出端均采用19位绝对值编码器,定位精度高

采用过流保护、过压保护、低压保护、过温保护、PWM dead time保护、PWM shoot through保护等多重安全保护措施,有效降低关节电气元件及机械结构的损坏
采用DC48V供电,EtherCat通讯接口,电气线缆少,连接便捷,伺服通讯频率高达4kHz
支持位置模式、速度模式、力矩模式等多种控制模式的任意切换
| 型号 |  SA14 SA14 |
 SA17 SA17 |
 SA20 SA20 |
 SA25 SA25 |
 SA32 SA32 |
 SA40 SA40 |
|---|---|---|---|---|---|---|
| 基本性能 | ||||||
| 额定扭矩(Nm) | 10 | 31 | 52 | 87 | 178 | 382 |
| 启停容许最大扭矩(Nm) | 36 | 70 | 107 | 217 | 459 | 841 |
| 瞬间容许最大扭矩(Nm) | 70 | 143 | 191 | 395 | 892 | 1530 |
| 额定转速(RPM) | 49.5 | 34.6 | 34.6 | 28.9 | 24.7 | 18.6 |
| 最大转速(RPM) | 56 | 44 | 39.8 | 30 | 31 | 18.6 |
| 定位精度(deg) | +/-0.01 | |||||
| 电气性能 | ||||||
| 额定功率(W) | 159 | 183 | 366 | 732 | 1000 | 1257 |
| 额定电压(VDC) | 48 | 48 | 48 | 48 | 48 | 48 |
| 额定电流(A) | 4.4 | 5 | 9.7 | 16 | 27 | 27 |
| 峰值电流(A) | 13.6 | 15 | 29.1 | 48 | 89 | 72 |
| 通信协议 | EtherCAT,CiA402 | |||||
| 机械性能 | ||||||
| 中通孔直径(mm) | 8 | 11 | 8 | 12 | 16 | 16 |
| 减速比 | 101 | 101 | 101 | 121 | 121 | 161 |
| 编码器 | 双绝对值磁编,输出端分辨率19Bits | |||||
| 制动器 | 电磁摩擦式 | |||||
| IP等级 | IP54 | |||||
© 2025 Copyrights codroid.ai All rights reserved.
南京埃斯顿酷卓科技有限公司 版权所有 苏ICP备2023008279号-1












